Le scanner 3D connaît un essor fulgurant ces dernières années… C’est un moyen rapide et efficace pour un grand nombre d’entrepreneurs de passer à la numérisation : contrôle qualité, inspection visuelle, mesurage précis de dimensions, prototypage, calcul de volumes,... le scanner 3D apporte beaucoup d’avantages au milieu industriel, à la rétro-ingénierie ou encore aux jeux vidéos… Mais pas seulement ! Depuis quelques années, cette technologie tend à se démocratiser et à intéresser de nombreux secteurs d’activités ainsi que Monsieur et Madame Tout-le-monde, grâce au développement de l’impression 3D notamment.
Le scan 3D est une technique qui va vous intéresser si vous ne maîtrisez pas tout à fait les logiciels de Conception Assistée par Ordinateur ou si vous ne trouvez pas votre bonheur avec les modèles 3D disponibles sur le net. Nous vous présentons les critères à ne pas négliger lors du choix de votre scanner, les techniques les plus courantes et les différentes étapes pour numériser votre élément.
 Pour quoi faire ?
Pour quoi faire ?
Vous désirez recréer un objet numériquement, un espace, un bâtiment,... et, éventuellement, le modifier par la suite ? Le scan 3D peut vous aider ! Comme expliqué dans la fiche sur l’impression 3D, il existe plusieurs moyens d’obtenir un modèle 3D, et le scanner 3D en fait partie !
Le scanner 3D offre de nombreux avantages :
-
Il va très rapidement collecter les données et recréer très précisément et en bonne qualité la forme et l’apparence de votre objet (ou de votre bâtiment,...) de façon numérique et ce, quelque soit sa taille, sa forme, son matériau,...
-
Vous pourrez reproduire votre objet beaucoup plus facilement et rapidement : vous n’aurez plus besoin de fabriquer des dizaines de moules pour vos pièces par exemple, il suffira de dupliquer et d’éditer votre fichier numérique autant de fois que souhaité.
-
Simuler précisément votre objet ou votre espace va vous (ou vos clients) permettre de mieux vous projeter, de mieux contrôler et, si besoin, de réparer plus efficacement également.
-
Le scanner 3D permet également de réduire les risques liés à une mauvaise manipulation (détérioration de l’objet), à une perte (l’archivage des données est plus facile!) ou à des endroits difficilement accessibles.
-
Autrefois, les coûts de la machine, des logiciels, d’une formation… rendaient l’utilisation de cette technologie peu accessible. Aujourd’hui, on peut trouver de plus en plus de scanners à prix abordables, des logiciels gratuits et open source, et même des fablabs qui vous procurent les machines et les connaissances... Chacun peut décider de s’y mettre !
On peut dire que, de façon générale, le scanner 3D est un élément qui devient incontournable pour le développement et la conception de produit, il vous permet de minimiser vos coûts tout en accélérant vos délais de commercialisation.
 Pour qui ?
Pour qui ?
Le scanner 3D et, de façon plus globale, la numérisation sont des leviers importants que les entreprises doivent mettre en place pour innover plus efficacement actuellement. Presque tous les domaines sont concernés : la rétro-ingénierie, l’audiovisuel, l’architecture, le génie civil, le patrimoine culturel, l’archéologie, le médical, la joaillerie, la construction, l’art et le design, ... mais aussi le particulier qui veut créer et fabriquer autrement.
 Comment choisir votre scanner ?
Comment choisir votre scanner ?
Tout le monde ne va pas utiliser le même scanner et un scanner 3D ne se choisit pas n’importe comment ! Il existe plusieurs technologies, avec pour chacune des avantages et des inconvénients. Le choix d’un scanner va dépendre d’un certain nombre de facteurs, notamment :
-
- Le type de l’élément à scanner : par exemple, utiliser un scanner laser sur un visage humain peut être dangereux et problématique sur une surface transparente.
-
- La taille de l’élément à scanner.
-
- La mobilité de votre scanner : avez-vous besoin d’un scanner mobile qui est plus pratique ou d’un scanner fixe qui est plus précis ?
-
- Le champ de vision du scanner : un plateau rotatif ou le déplacement de l'objet sur plusieurs axes est-il nécessaire (afin que le scanner puisse “voir” l’ensemble de l’élément) ?
-
- La résolution de la numérisation : il s’agit du niveau de détail de votre numérisation lors d’un seul scan, il se mesure grâce à la distance entre deux points sur votre modèle 3D. Plus la résolution est élevée, plus la densité de points sur le modèle le sera aussi et la modélisation de votre élément sera donc très détaillée... mais la taille de votre fichier 3D sera également très élevée et cela risque d’entraîner un temps de traitement et de transfert beaucoup plus long.
-
- La précision de la numérisation : il s’agit du degré de fidélité entre le modèle 3D et l'élément réel lors d’un seul scan.
-
- La vitesse de numérisation : il s’agit de la vitesse de capture des données lors d’un seul scan.
-
- L’environnement de scan : la luminosité ambiante peut être problématique selon la technologie utilisée.
-
- Le budget : le budget va dépendre du coût de la machine, des logiciels nécessaires mais aussi d’une formation éventuelle si vous n’avez pas les connaissances suffisantes pour l’utiliser correctement.
En bref, le choix de votre scanner doit être réalisé en fonction de l’usage et des besoins que vous avez. Pour approfondir ces critères de choix, nous vous conseillons ce lien ou encore celui-ci.
Les différentes techniques de numérisation 3D
Il existe plusieurs techniques de numérisation d’un objet en trois dimensions et les scanners se divisent en deux grandes familles : les scanners avec contacts ou sans contact par rapport à l'élément à numériser. Nous abordons dans cette section les techniques les plus courantes. Vous devrez veiller à choisir celle qui vous convient selon votre élément à numériser et son contexte.
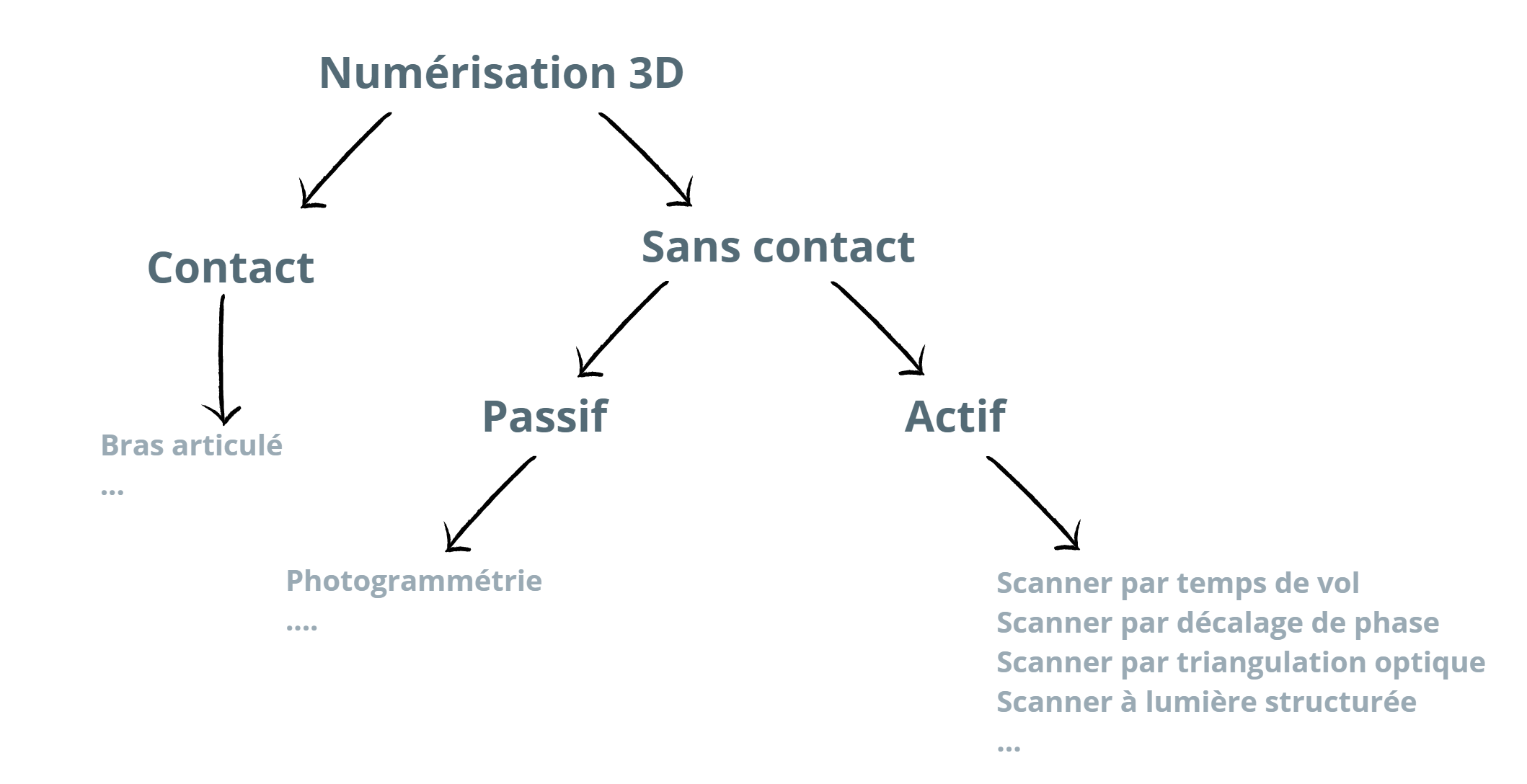
L’illustration ci-dessus schématise succinctement la manière dont nous avons classé les techniques de scan 3D. Comme expliqué, nous n’abordons que certaines d'entre elles (celles indiquées en gris dans le schéma).
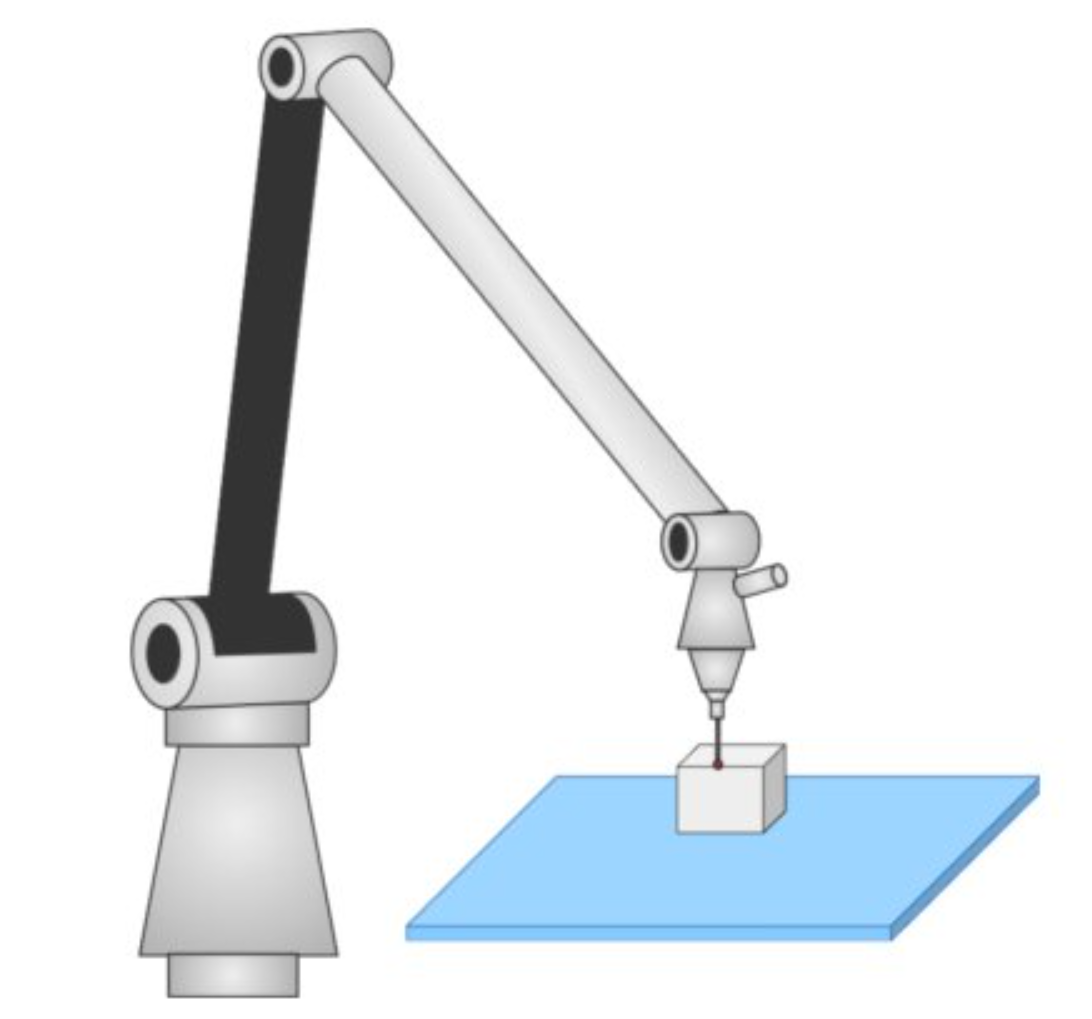
1 Les scanners par contact
Le scanner, à l’aide d’un capteur de contact appelé “palpeur” ou “sonde” (souvent placé sur un bras robotisé), touche la surface de l’objet à numériser et enregistre chaque déformation.
Cette technique permet une très grande précision des données ; le bras de palpage se déplace dans toutes les directions et mesure les distances, les courbes, les surfaces cylindriques,...et peut scanner des objets ayant une surface transparente ou réfléchissante. Elle n’est cependant pas adéquate pour des objets ayant une forme organique ou complexe car il y a toujours le risque, à cause du contact, que l’objet soit abîmé voire même détruit.
Cette technique est très lente étant donné que la mesure (automatique ou manuelle) se fait point par point, mais elle est adéquate pour contrôler la qualité de pièces fabriquées par exemple.
2 Les scanners sans contact
Les scanners sans contact se divisent en deux sous-groupe :
-
- Les scanners sans contact actifs
-
- Les scanners sans contact passifs
2.1 Les scanners sans contact actifs
Ce type de scanner a besoin de projeter une lumière et de détecter sa réflexion sur la surface de l’objet.
2.1.1 Lasergrammétrie / Balayage laser 3D
Cette technique est la plus répandue et la plus utilisée actuellement. La lasergrammétrie est une technique reposant sur le balayage de mesures effectuées à l’aide d’un laser. Ce balayage repose sur le principe du LiDAR (Light Detection And Ranging), c’est-à-dire la télédétection laser par télémétrie. C’est une méthode de calcul qui consiste à déterminer la distance entre un capteur LiDAR et une cible. Le capteur va émettre une lumière laser vers un objet réel afin de capturer numériquement sa forme. Le capteur va déterminer la distance grâce à :
-
- la longueur d’émission du faisceau laser depuis sa source jusqu’à l’objet (lumière émise),
-
- la longueur de retour du faisceau laser depuis l’objet jusqu’à la source émettrice (lumière réfléchie),
-
- la vitesse de la lumière (299 800km/S).
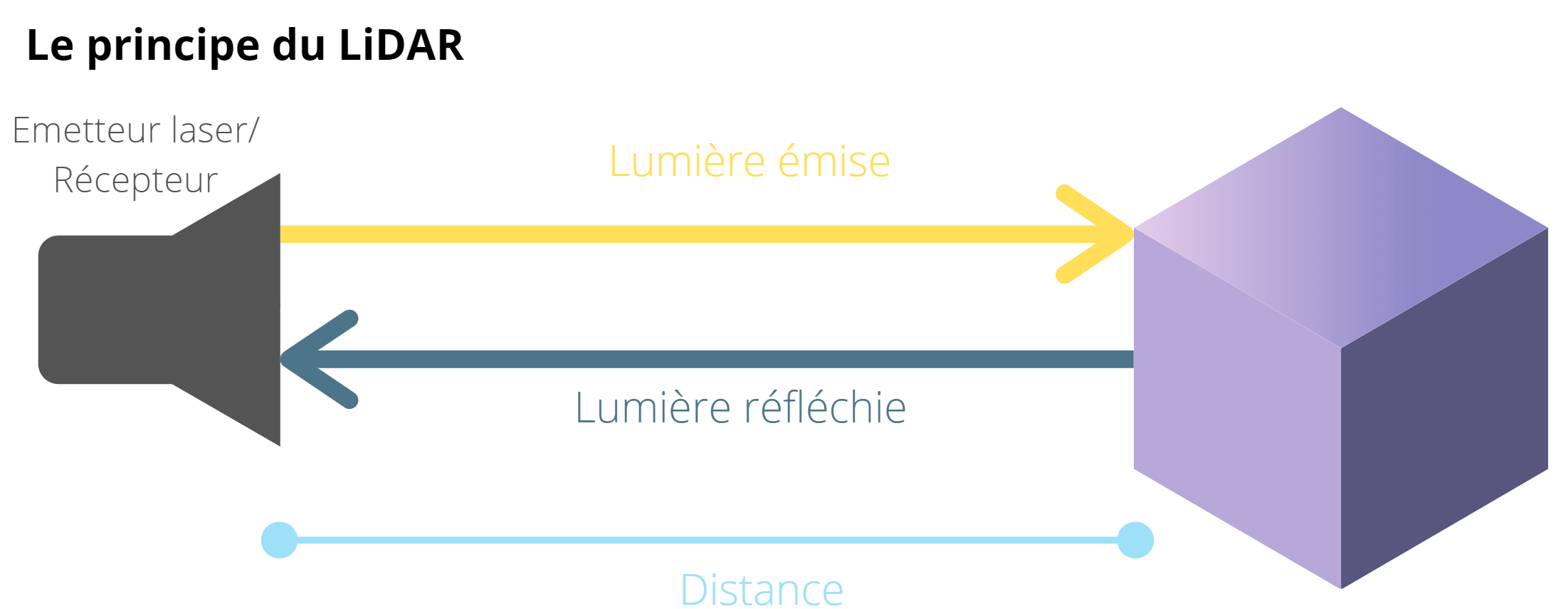
Un point relevé sur la surface réfléchissante de l’objet est référencé dans un espace tridimensionnel (avec des coordonnées X,Y,Z) grâce à la position et à l’orientation du capteur émetteur laser/receveur. Le LiDAR permet de capturer une énorme quantité de mesures extrêmement précises en balayant tout ce qui se trouve dans son champ de vision; il envoie une multitude de faisceaux laser afin de représenter l’ensemble de l’objet sous forme de nuage de points. Les données obtenues peuvent ensuite être traitées pour les convertir en maillage.
Cette technique est extrêmement précise tant au niveau de la résolution que de la précision (on parle en dizaines de micromètres)! Vous pouvez mesurer rapidement de très petits détails, mesurer des géométries complexes et obtenir un nuage de point extrêmement dense et précis. Cela se fait sans contact direct avec l’objet à numériser, vous n’avez plus besoin de vous aventurer dans des zones difficiles d’accès ou d’avoir peur de dégrader un objet fragile, comme une pièce archéologique par exemple.
Les lasers sont peu sensibles à la lumière ambiante, vous pouvez donc utiliser votre scanner laser lorsqu’il pleut, neige et même lorsqu’il y a du brouillard (néanmoins faites attention, vous risquez de trouver des points parasites). Par contre, ce type de scanner est extrêmement sensible aux propriétés physiques des surfaces à scanner : si votre surface est brillante, noire ou transparente, la lumière ne sera pas correctement réfléchie. Cela ne marche pas avec des surface liquide également.
Vous trouverez davantage d’informations sur les scanners Laser 3D et LiDar sur ce site (scanner laser 3D multi-echo ou simple écho, LiDAR en station fixe ou mobile, LiDAR multi-spectral et hyper-spectral,...).
Le système LiDAR repose sur 2 techniques (vous pouvez trouver plus d’informations à ce sujet sur le site référencé ci-dessus ou ici) :
2.1.1.1 Le scan à impulsion laser/ à temps de vol (Time of Flight)
Dans ce cas, on détermine la distance entre le scanner et l’objet à numériser en mesurant la durée que met le laser à toucher une surface de l’objet et à revenir vers sa source émettrice. C’est le principe même du LiDAR : on mesure le temps de propagation du faisceau laser.
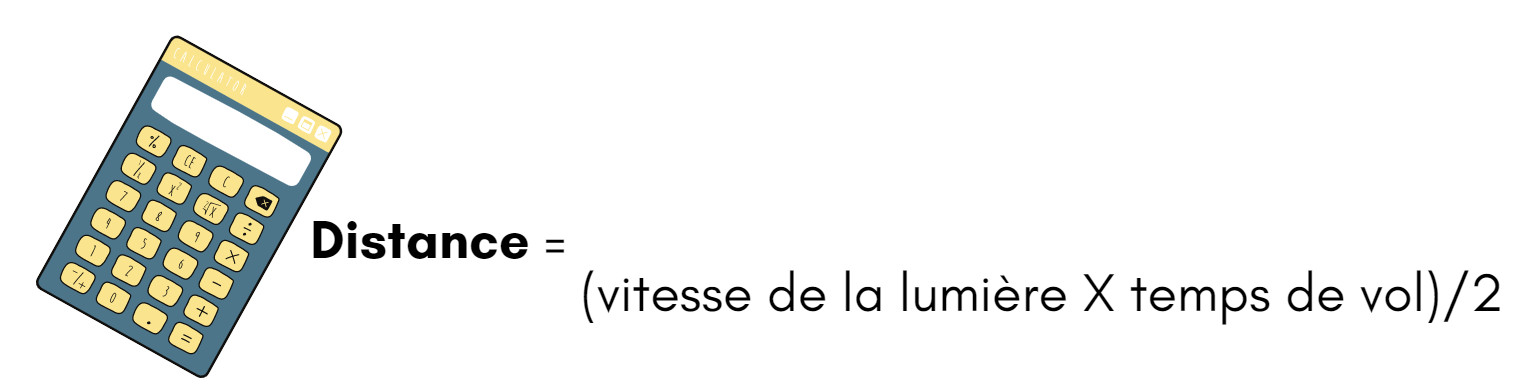
Cette technique est idéale pour les mesures à longue portée, pour scanner les grands objets et grands environnements. Elle se caractérise cependant par une certaine lenteur dans l’acquisition des données car le scanner effectue une mesure à la fois : il émet l’impulsion de lumière suivante lorsqu’il réceptionne l’impulsion précédente.
2.1.1.2 Le scan à décalage de phase/ à impulsions déphasées
Le principe est le même que pour la technologie à impulsion laser (le principe du LiDAR) mais elle est plus précise car l’amplitude du faisceau laser est modulée (la longueur d’onde d’émission varie selon le modèle de scanner) et l’onde est continue. Le scanner projette le faisceau laser et ce faisceau revient grâce à la réflexion mais avec un angle différent. La phase du laser émise est comparée par le scanner avec la phase renvoyée au capteur et la différence entre les deux est appelée “décalage de phase”, la distance est donc mesurée à partir de chaque modulation individuelle.
Cette technique est plus rapide que la technique à temps de vol (jusqu’à 1 million de points par seconde) mais la portée du laser est plus réduite (il est plutôt à envisager pour une portée moyenne).
2.1.2 Le scan laser par triangulation optique
Cette méthode utilise également un laser : le scanner projette un faisceau laser sur l’objet à numériser, la surface de l’objet déviela trajectoire de ce faisceau et cette déviation est enregistrée par le capteur. C’est donc l’appareil photo qui permet de situer le point laser.
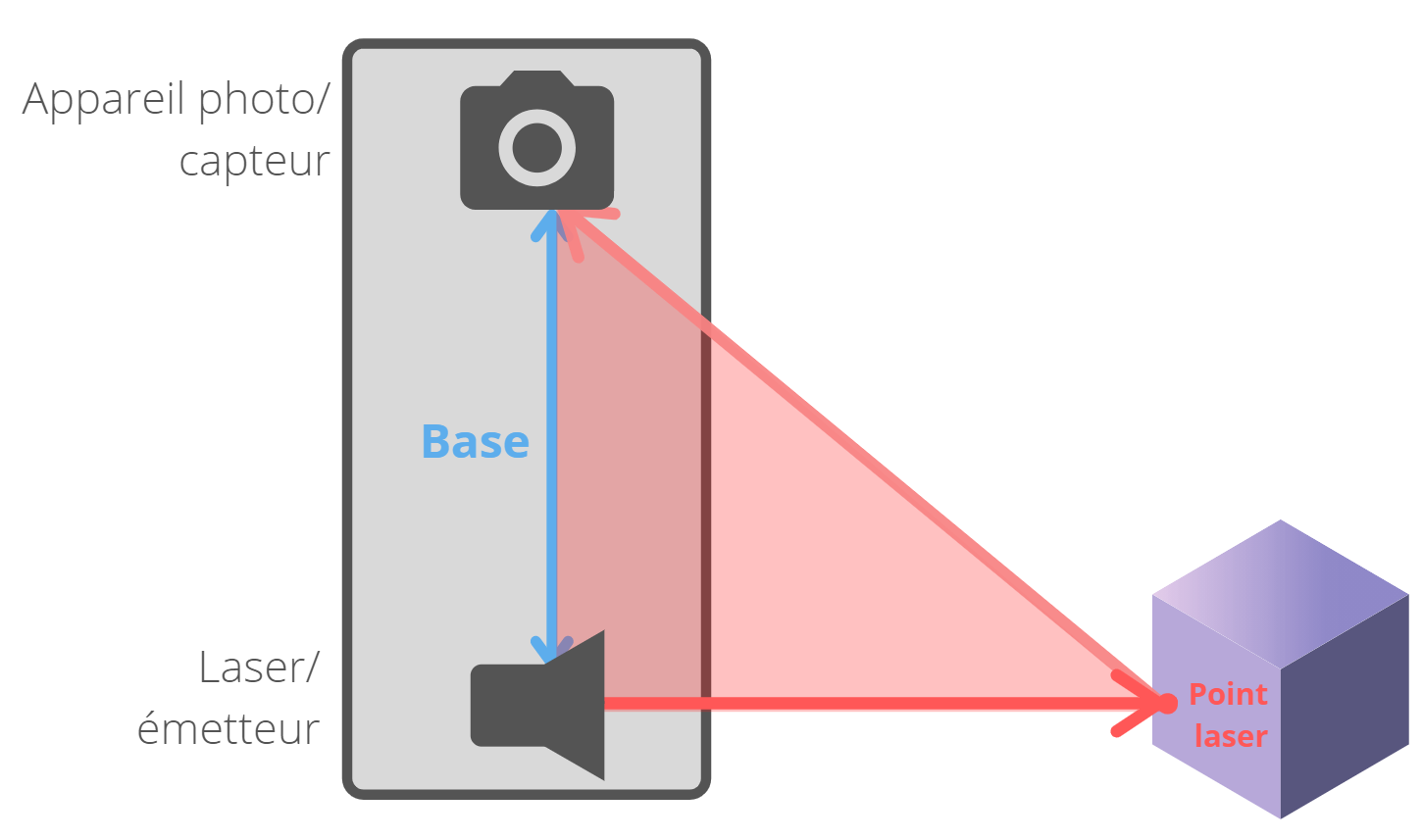
On parle de triangulation car, comme vous pouvez le voir sur le schéma ci-dessus, un triangle est formé entre l’émetteur laser, le point laser et l’appareil photo. Le scanner va calculer la distance scanner-objet grâce à la triangulation trigonométrique :
-
- la distance entre l’appareil photo/capteur et le laser est connue (il s’agit de la “base” sur le schéma),
-
- l’angle entre le laser et l’appareil photo/capteur est également connu,
-
- le scanner va déterminer l’angle auquel le faisceau laser réfléchi revient vers l’appareil photo/capteur (et donc déterminer la distance scanner-objet).
Le scanner utilise un point laser unique ou une bande laser pour balayer l’objet et accélérer le processus d’acquisition des données. Un plateau rotatif peut permettre de saisir toutes les faces de l’objet.
Les avantages de cette technique sont qu’elle procure une très grande précision et résolution (meilleures que les scanners à temps de vol). Étant une technique plutôt de faible portée (quelques mètres), elle convient parfaitement pour les objets de petite taille. Vous pouvez trouver des scanners à triangulation laser à prix abordables.
Ses inconvénients sont que, comme tout scanner utilisant un laser, certaines propriétés physiques des surfaces peuvent être problématiques (transparence, brillance,...).
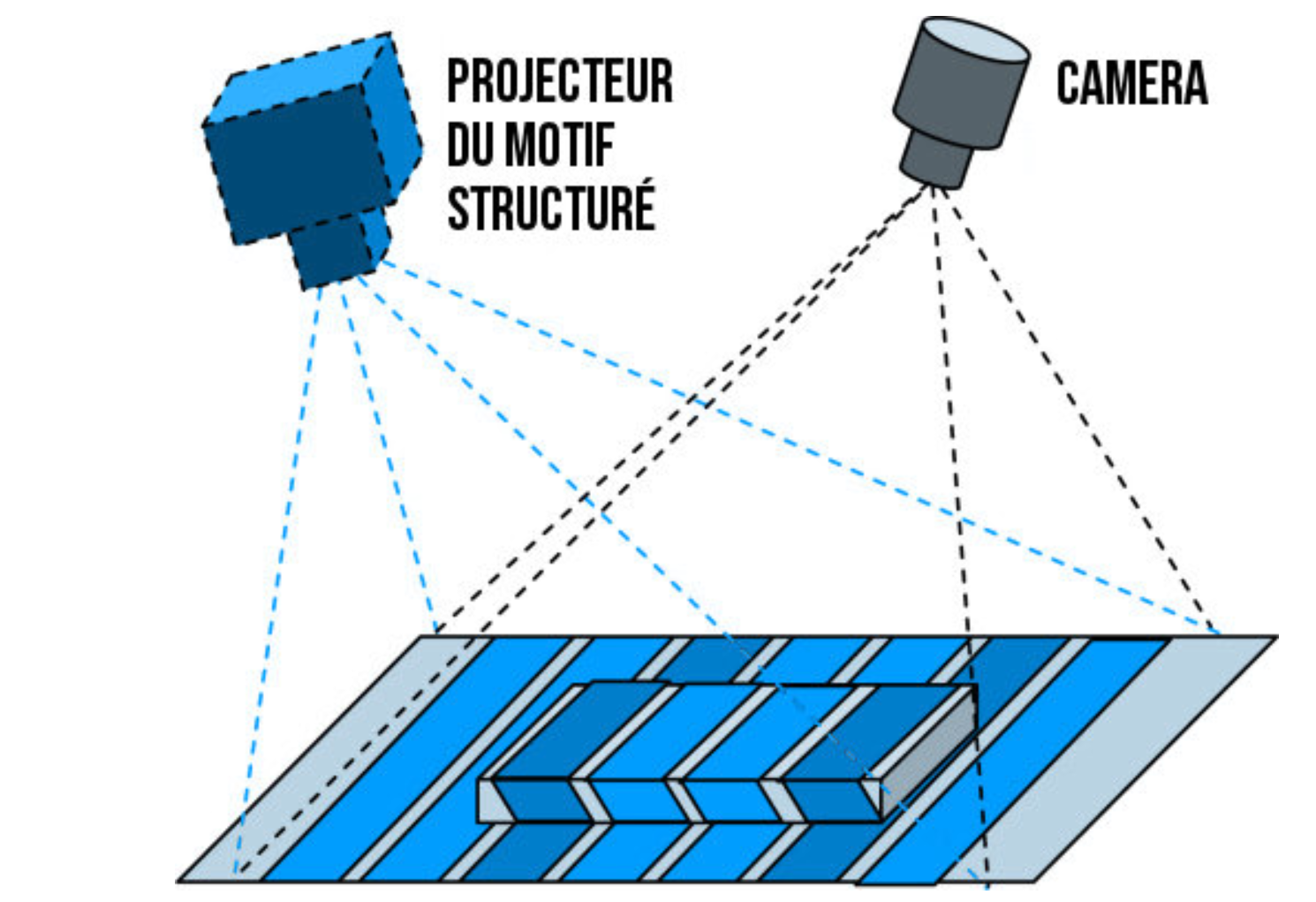
2.1.3 Le scan à la lumière structurée
Le scanner à lumière structurée, aussi appelé scanner à balayage de lumière projetée, peut être considéré comme une alternative au balayage laser 3D. En effet, cette technique fonctionne comme les scanners à laser : le scanner projette une lumière sur l’objet à numériser et une caméra enregistre et analyse la déviation de cette lumière projetée en effectuant un calcul de triangulation trigonométrique.
Dans le cas du scanner à lumière structurée, c’est un motif lumineux (cela peut être une grille, une ligne, des vagues,...ou bien d’autres formes plus complexes) qui est projeté à l’aide d’un projecteur numérique et qui balaie le champ de vision afin de capturer les informations concernant toutes les distances entre les points. Ensuite, le scanner calcule la distance entre le scanner et l’élément à numériser en examinant tous les bords du motif. Contrairement à la technique par laser qui scanne avec un point unique ou avec une ligne laser, la technique par lumière structurée permet de scanner une large surface en une seule fois.
Le scanner à lumière structurée procure très rapidement, c’est-à-dire en quelques secondes, un objet/3D en haute résolution (la résolution et la précision sont plus élevées que par triangulation optique). Cette technologie est surtout utilisée pour tout ce qui relève de la reconnaissance faciale ou environnementale car elle est adéquate pour toutes les surfaces complexes (pour les surfaces organiques détaillées, les objets fragiles, la rétro-ingénierie, la conception de prototype,...). Un autre exemple d’utilisation est celui de la Kinect V1; il s’agit d’un capteur de vision tridimensionnel développé par Microsoft en 2010 et qui fonctionnait avec la console de jeux vidéo Xbox 360. La Kinect utilisait cette technique de lumière structurée pour capturer et recréer une objet en 3D (en l'occurrence, le corps des joueurs face à la Kinect), ce qui a rendu l’expérience de jeu beaucoup plus immersive. Les iphones utilisent également cette technique pour la reconnaissance faciale (vous trouverez une courte vidéo explicative sur le site de Numérisation 3D & Construction).
De même que le scanner à triangulation optique, la portée de ce scanner est assez faible et il est très sensible aux conditions d’éclairage ainsi qu’aux propriétés physiques de l’objet à numériser.
2.2 Les scanners sans contact passifs
Ce type de scanner n’utilise pas de source de lumière pour extraire des données tridimensionnelles, contrairement aux méthodes actives décrites ci-dessus. Elles sont obtenues par l’observation de l’apparence de l’environnement et/ou de l’objet (vues multiples, netteté de l’image,...). Ces techniques passives sont tributaires de l’éclairage ambiant car elles se basent sur la détection du rayonnement ambiant réfléchi.
2.2.1 La photogrammétrie
La photogrammétrie, c’est très simple : vous effectuez un scan 3D à partir de photographies! Vous prenez différentes photos avec des angles de vue différents et ensuite, un logiciel identifie les points similaires entre celles-ci.
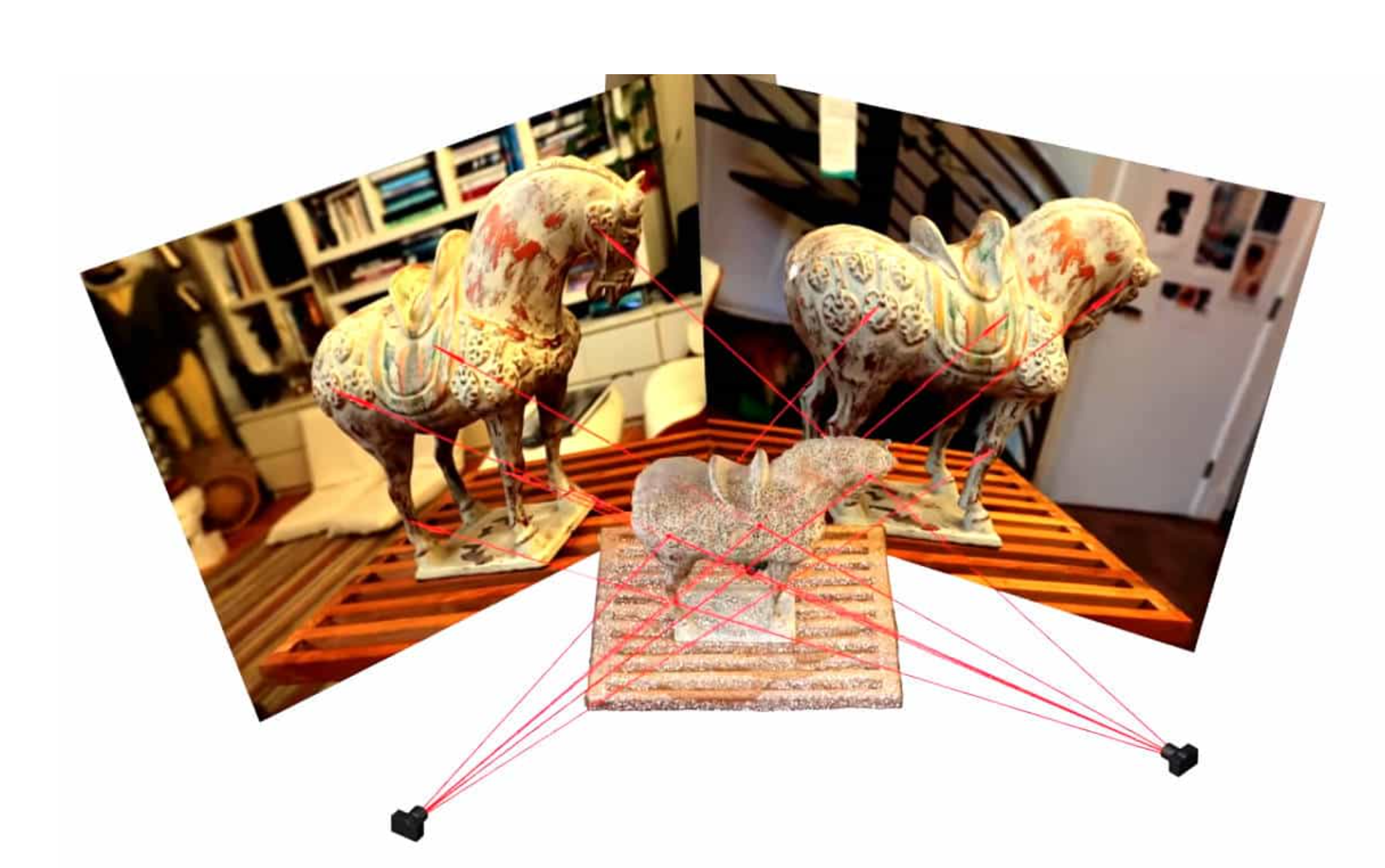
Le logiciel va générer le modèle 3D après avoir comparé, pixel par pixel, chaque photo et pris en compte la forme, le volume et la profondeur de l’objet/l’environnement à numériser. Il va repositionner ces photos dans un espace tridimensionnel et votre nuage de points est créé. Par contre attention, la particularité de cette méthode est que votre élément numérisé n’est pas à l’échelle, vous ne devrez pas oublier de recalibrer l’image. Le nuage de points obtenu par cette méthode représente l’intégralité de l’objet/environnement capturé, contrairement aux nuages de points obtenus par scanner laser.
Les avantages de cette technique sont qu’elle permet une bonne précision et les données sont rapidement acquises (cela va vite de faire des photos!). Elle fonctionne avec tous types d’objets (même avec des éléments photographiés depuis le ciel) et est très pratique pour numériser des objets de très grandes tailles (bâtiments,...).
Ses inconvénients concernent surtout la sensibilité à la qualité des photos et le temps de calcul qui est assez long mais nécessaire pour créer la surface 3D (ou alors votre machine doit vraiment être ultra puissante). La photogrammétrie est sensible aux conditions météorologiques (vos photos ne donneront rien par temps de pluie, brouillard ou neige) mais elle permet une haute résolution, à défaut d’une bonne précision.
Vous trouverez plus d’explications et conseils sur ce site mais en résumé :
-
- Plus vos photos auront une bonne résolution, plus la capture sera en ultra haute définition.
-
- Avoir un appareil photo grand-angle est indispensable.
-
- N’utilisez pas votre zoom, vous perdrez des pixels! Pensez à la résolution de l’image…
-
- Faites le plus de photos possibles avec des points de vue différents et évitez de photographier les objets en mouvement.
Une fois votre série de photos réalisée, vous aurez besoin d’un logiciel pour traiter les données et obtenir votre fichier 3D. En voici quelques-uns :
-
Meshroom : il s’agit d’un logiciel open-source et gratuit, basé sur l’environnement AliceVision. Un tutoriel réalisé par Sketchfab vous explique comment créer automatiquement un modèle 3D, comment se retrouver dans l’interface utilisateur,...et vous apporter pleins de conseils supplémentaires.
-
Regard3D : c’est un logiciel libre et open-source qui fonctionne sur Windows, OS X et Linux. Très puissant, il peut être un peu difficile à prendre en main pour des débutants mais ce logiciel vous permet de découvrir la photogrammétrie grâce à de nombreux tutoriels.
-
3DF Zephyr Free : une version gratuite de ce logiciel très complet est disponible pour vos usages personnels. Si vous êtes débutants, vous y retrouverez tous les outils de base.
- Autodesk ReCap Pro : ce logiciel est payant et propose notamment des options avancées pour la photogrammétrie aérienne ou à courte portée mais aussi pour la numérisation laser. Il fonctionne sur Windows.
 Quelles sont les étapes d’un scan 3D ?
Quelles sont les étapes d’un scan 3D ?
Le processus de scan d’un élément diffère selon la technologie utilisée mais de façon globale, cela est très simple :
1 La préparation de votre élément
Selon le type de scanner utilisé, certaines surfaces nécessitent la vaporisation d’une poudre mate pour pouvoir être correctement scannées car elles sont transparentes, brillantes,...
2 Le scan de votre élément
Plusieurs prises de vues sont sûrement nécessaires pour obtenir la modélisation intégrale de votre élément. Le résultat de ce scan est que vous obtenez plusieurs nuages de points (point cloud en anglais) où chaque point a des coordonnées x,y,z, sous forme de plusieurs fichiers bruts. A l’aide d’un logiciel souvent vendu avec votre scanner 3D, vous devez importer et pré-traiter vos différents nuages de points afin de n’en avoir qu’un seul. Cette opération (manuelle ou automatique) va vous permettre d’adapter, d’assembler, de “nettoyer” votre nuage de points des données inutiles et parasites, et de réduire la taille de votre fichier final (consultez ce lien pour plus d’astuces).
Comme logiciels de traitement de nuages de points, nous pouvons citer 3DMeteor, Pointcab, VisionLidar (attention, votre choix de logiciel de traitement peut fortement dépendre du type de scanner utilisé).
3 Transformation du nuage de points en maillage polygonal
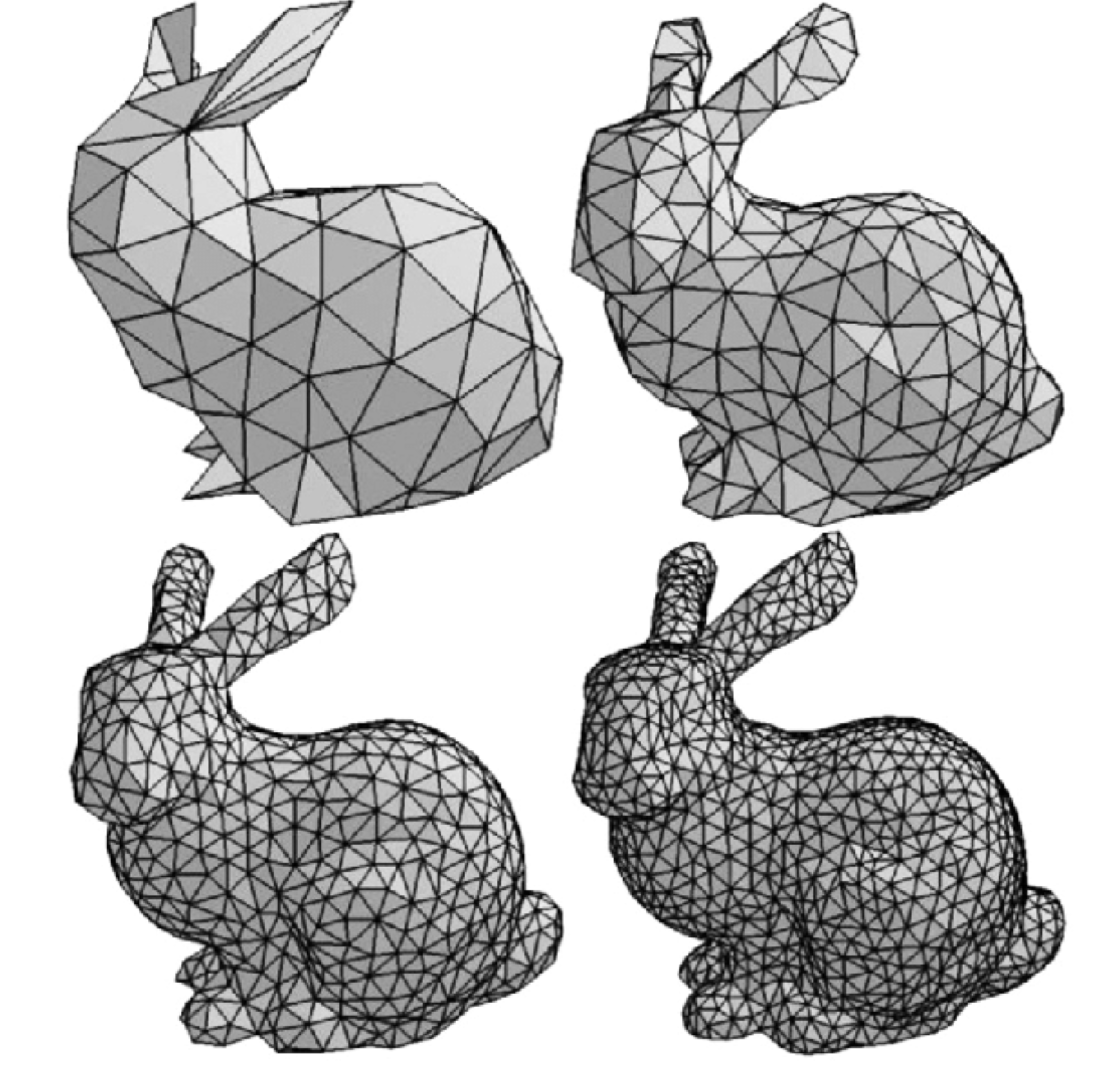
Bien que nettoyé et amélioré, ce nuage de points ne peut pas être interprété tel quel par une imprimante 3D par exemple. Le logiciel du scanner 3D doit transformer ce nuage de points en un maillage polygonal (mesh en anglais) : des figures polygonales (ce sont souvent des triangles) sont créées à partir des points et l’ensemble représente la surface de l’objet.
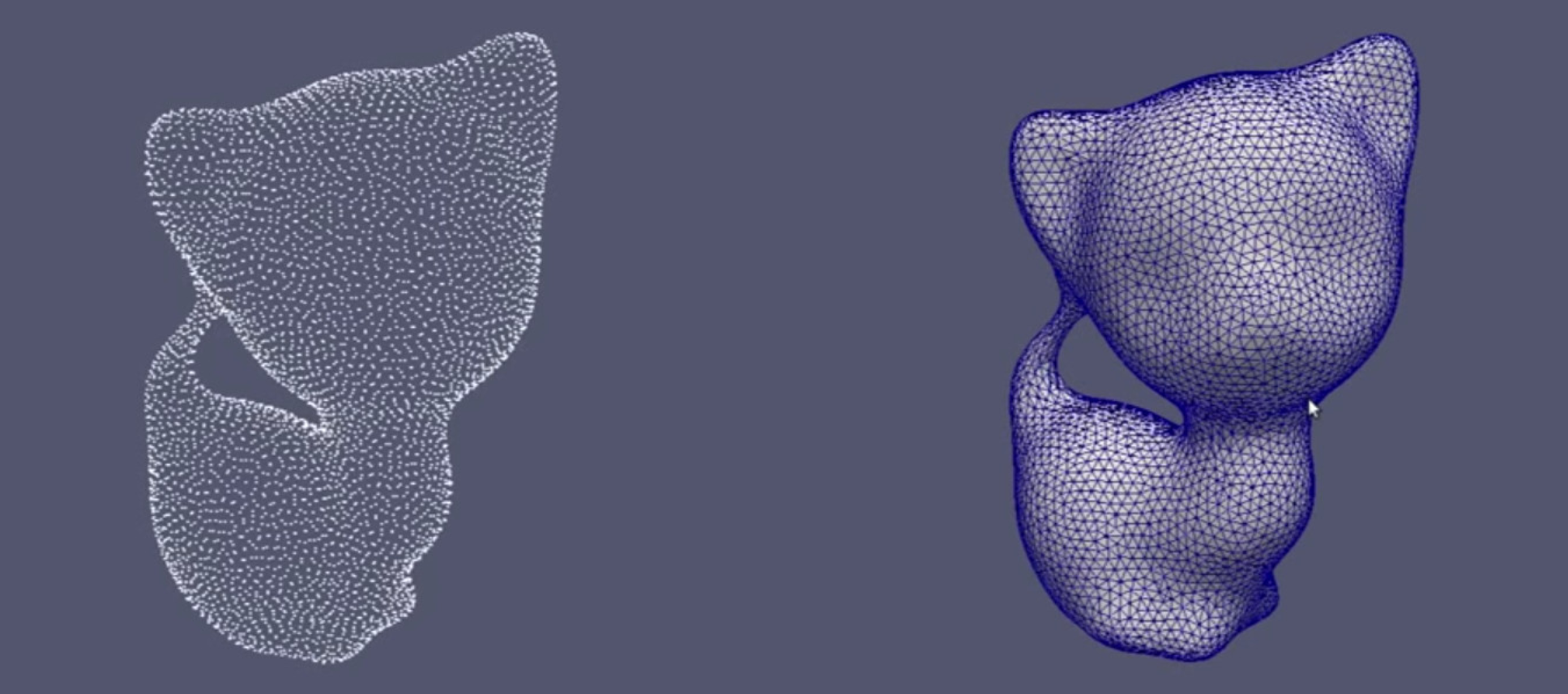
N’oubliez pas que plus la densité du maillage est élevée, plus votre modèle 3D sera défini et détaillé… mais votre fichier sera très volumineux! C’est pourquoi l’étape précédente concernant le traitement du nuage de points est importante.
A la suite de ce maillage, vous pouvez éventuellement ajouter une texture sur votre représentation et optimiser le maillage en supprimant les parasites créés lors de sa conception. Il ne vous reste plus qu’à exporter votre fichier final.
Comme logiciel libre de traitement de maillage 3D, nous vous suggérons MeshLab. Il comprend de nombreux outils dont des outils de tranchage (ce qui est intéressant si vous faites de l’impression 3D !).
4 Exportation du fichier au format .stl
Toutes les informations relatives à la géométrie de l’objet (les surfaces de mailles) sont stockées dans un fichier soit au format .stl ou .obj (il s’agit de formats ouverts supportés par de nombreux logiciels) soit dans un format propriétaire. Une fois exporté, ce fichier peut être ensuite édité dans un logiciel CAO.

Pour aller plus loin… Découvrez le  !
!
Vous avez une question? Vous désirez en savoir plus ou tout simplement vous mettre au scan 3D et même tenter l’impression 3D? Delphine et Sylvain du Fab-C (partenaire du Hub Créatif de Charleroi) sont là pour vous aider! N’hésitez pas à les contacter!
Saviez-vous que le Fab-C dispose d’un Einscan Pro avec un plateau tournant, un trépied et le module de capture de couleurs? Voici ses caractéristiques :
-
Tailles recommandées de l’objet à scanner : 0.05 à 4 mètres
-
Mode Manuel HD :
-
Résolution : 0,1mm
-
Vitesse de scan : 90000 points/sec
-
Distance entre les points : 0.2 – 2 mm
-
-
Mode Manuel rapide :
-
Résolution : 0,1mm
-
Vitesse de scan : 90000 points/sec
-
Distance entre les points : 0.2 – 2 mm
-
-
Mode fixe avec table tournante :
-
Résolution : 0,05mm
-
Vitesse de scan : < 2sec
-
Distance entre les points : 0,16 mm
-
-
Fichiers de sortie : OBJ, STL, ASC, PLY
 Besoin d’une aide supplémentaire ?
Besoin d’une aide supplémentaire ?
Le Hub-C dans le cadre de ses services d’accompagnement numérique organise des workshops et groupes de travail en lien avec les nouvelles technologies de prototypages. Vous souhaitez un accompagnement pour votre projet innovant ou vous souhaitez participer à un prochain workshop? N'hésitez pas à contacter un membre du Hub ou de la fab-team ou à consulter les évènements à venir du Fab-C!
Vous avez une question spécifique à propos d’une fiche? Elles sont réalisées par les experts du CETIC (Centre d'Excellence en Technologies de l'Information et de la Communication), un centre de recherche appliquée en informatique situé à Charleroi. Vous trouverez toutes les coordonnées ici.